Телескопи, светоприемна апаратура | Конспект - операторски изпит | Таблици NAKOSTA a и d, регистри
Старата система за управление на 2-м телескоп бе подменена в края на лятото на 2009 г. Можете да разгледате инструкцията за работа с новата система (PDF, 941 KB).
УПЪТВАНЕ ЗА ОБСЛУЖВАНЕ НА ДВУМЕТРОВ
ТЕЛЕСКОП В НАО-РОЖЕН И НА ПОДВИЖНАТА
СПОМАГАТЕЛНА ПЛАТФОРМА
Извадки от документацията за обслужване
Теми:
БЕЗОПАСНА РАБОТА С ПОДВИЖНАТА ПЛАТФОРМА
ИНСТРУКЦИИ ЗА РАБОТА С ПОДВИЖНАТА ПЛАТФОРМА
УПЪТВАНЕ ЗА ОБСЛУЖВАНЕ НА 2m ТЕЛЕСКОП
1.2. Фокусиране
1.3. Управление на затвора на касетата
1.4. Управление на купола и пердето
1.5. NAKOSTA α
1.6. NAKOSTA δ
1.7. Фотогид LNK
1.8. Най–точно движение
1.9. Блок насочване
1.10. Интерфейс на KSR 4100
1.11. Интерфейс на четеца
Функция на бутоните - HP и BP /главен и на количката/
Функция на сигналните лампи - HP и BP
Функция на бутоните – CP /Куде-пулт/
Функция на сигналните лампи - CP
3. Адреси на централните регистри
4. Функции на оборудването за управление
4.2. Координатен изчислител (KSzM), цифров часовник (D I0) и централен честотен генератор (KFO)
4.3. Синхронно предаване на ъглови данни (SzHA)
4.4. Програмируем делител на честота (FOP)
4.6. Фокусиране
4.7. Програмиране на движение NAKOSTA a
4.7.1. Програмиране на FOP
4.8. Управление на стъпковите мотори
4.8.1. Най-точно движение
4.8.2. Програмиране на движение NAKOSTA d
Особености за движенията NAKOSTA a и d
4.8.3. Фотогид
4.8.4. Управление на стъпковите двигатели IPS-5
4.9. Четящо устройство
4.9.1. Изпълнение и функции
4.10 Блок насочване (PE)
4.10.1. Изпълнение
4.10.1.1. Общо описание
4.10.1.2. Подробно описание на PE
4.10.1.2.2. Вход-изход, знаци на PE-управлението
8.2. Модул ”Регистри”
8.4. Ръчно управление на движения
Особености при работа с телескоп на запад от колоната
8.5. Синхронно часово движение
8.6. Движение NAKOSTA a
8.7. Движение NAKOSTA d
8.8. Фокусиране
8.9. Управление на затвора на касетата
8.10. Управление на купола
8.11. Ръководство за работа с блока за насочване PE
8.11.1. Пряко управление на насочването
8.11.2. Автоматично насочване
8.12. Сигнализация за грешки и край на операции
8.13. Управление на ЦИМ
8.14. Ръчен изнесен пулт
8,15. Обслужване на шкафа с цифрова ел. апаратура
8.17. Отопление и вентилация на телескопа
8.18. Куде-спектрограф
8.19. Други обслужващи и сигнални елементи
8.20. Проверка на звездния часовник
8.21. Корекция за рефракцията
БЕЗОПАСНА РАБОТА С ПОДВИЖНАТА ПЛАТФОРМА
В процеса на работа могат да се случат следните нежелани ситуацииц и проблеми:
1. Първичното рамо не се спуска поради повреда в таблото или хидравличната система:
- отпуска се аварийното кранче, което се намира в/у вторичното рамо бавно от втория човек, който се намира долу в подкуполното помещение, като същият внимава да не бъде затиснат от спускащото се първично рамо.След което задължително се затяга крана.
2. При спиране на ел. ток цялото токозахранване на командния пулт и таблото за движение на площадката намиращи се вътре в нея спират, което налага присъствие на втори човек в случая оператора, който да включи захранването от главния пулт и възобнови наблюдателния процес по най- бързия начин след идването на ел. ток.
3. При екстремни ситуации в площадката под командния пулт се намира въжена стълба, дълга 5м. и се използва при положение, че не могат да се вземат горепосочените мерки, а трябва да се слезе долу.
4. При влизане от светлото помещение в подкуполното през време на наблюдение очите не са се адаптирали и има опасност за влизащия да се блъсне в количката. Ето защо трябва да се гледа за сигналната лампа, която е поставена на корпуса на количката, а е препоръчително и наблюдаващия да предупреди къде се намира.
5. Не трябва да се стои в близост до движещата се платформа и свързващата греда, тъй като може да се получи контузия от движението и при промяна на положението на количката, когато е тъмно.
6. Слизането от площадката да става само при довеждането й в паркирано положение след чуването на специфичния синал и светването на индикацията на командния пулт.
7. Желателно е количката след приключване на работа да се оставя до железните капаци тъй като от нея капе масло и при пресичане на подкуполното помещение има опасност от подхлъзване.
8. Когато се наложи телескопът да бъде позициониран на запад от колоната трябва особено да се внимава да не се притисне наблюдателя или количката тъй като телескопът се движи надолу.
9. При движение в тъмнина в близост до светоприемната апаратура на телескопа, да се вземат всички възможни мерки за избягване на удар на платформата с телескопа. Препоръчва се с протегната към телескопа ръка да се контролира сближаването.
10. Опита показва, че при много ниски температури е възможно при спускане на рамената да се получи хидравличен удар на вторичното рамо. При тази сиуация да се избягват излишните движения с вторичното рамо.
ИНСТРУКЦИЯ ЗА РАБОТА С ПОДВИЖНА СПОМАГАТЕЛНА
ПЛАТФОРМА ЗА НАБЛЮДЕНИЕ НА 2M ТЕЛЕСКОП

Подвижната спомагателна платформа (количката).
Подвижната спомагателна платформа е удобно и сигурно съоръжение, което служи да придвижи наблюдателя до устройствата за наблюдение на 2м. Телескоп в желаното от него положение. Начина на скачване на отделните агрегати за движение позволяват на платформата голям обсег на действие, като с нея може да се постигне удобна позиция за наблюдение в почти всяко положение на телескопа.
Движението на платформата се осъществява посредством команден пулт монтиран в кабината й, позволяващ следните двиижения:
1. Кръгово движение по релсата около телескопа посредством ограничителна и стабилизираща греда.
2. Въртеливо движение около оста на самата платформа с помощта на електромотор.
3. Движение нагоре и надолу с първичното рамо на платформата.
4. Движение на вторичното рамо в две посоки.
Привеждането в действие на площадката за наблюдение се осъществява чрез включването на главния пулт намиращ се в операторската кабина.
Преди позиция 1 площадката задължително трябва да се намира в паркирано положение, по което се съди и от светещата индикация на главния пулт, а също и спомагателния пулт, намиращ се в самата платформа за наблююдение. Само при ова положение са възможни бързите движения на телескопа.
Редът за привеждане в действие на площадката е следния:
1. След позиционирането на телескопа към желания обект наблюдателя се качва на площадката посредством спускаща метална стълбичка, която се издърпва на иколо 0.5м от пода.
2. Пулта за движението на платформата се намира от лятвата страна на вратата м/у задната страна на вратата и пулта за управление на телескопа. Привежда се в действие след като вратата се затвори плътно и се натисне жълтия бутон, след което таблото светва със съответните цифрови и знакови индикации:
При нормално положение на количката, т.е. когато наблюдателя е застанал с лице към телескопа, а пулта се намира пред него – всички посоки отнасящи се за движението по релсата и кръговото движение около оста на излятото тяло крепящо рамената на платформата служещо за отдалечаване и приближаване на количката към телескопа са реални, съответстващи на посоката на стрелките обозначени на бутоните.
Внимание: При някои положения на телескопа когато платформата трябва да се завърти обратно т.е. когато тялото и наблюдателя са гърбом към телескопа, кръговите движения задействащи се от бутони 1, 2, 3и 4 са обратни на стрелките и при невнимание съществива реална опасност от удар на платформата с телескопа, когато е приближен много до него.

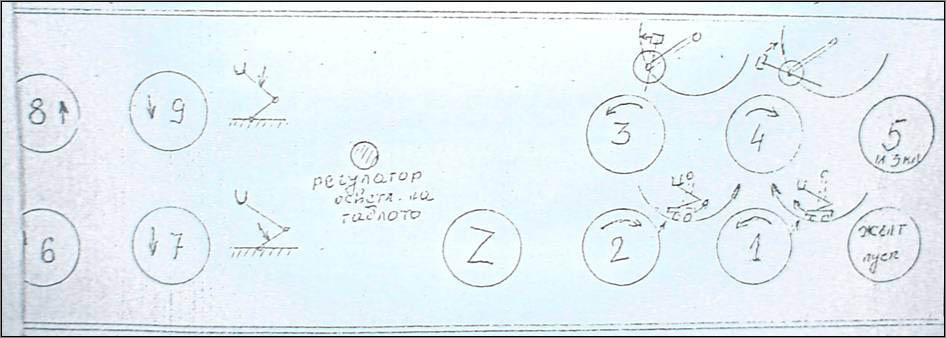
Пулт за управление на подвижната спомагателна платформа /количката/.
Ред и начин на действие с командните бутони на пулта за управление на платформата при нормално положение:
При натискане на бутон № 1 цялото съоръжение започва да се движи по релса около оста на подкуполното помещение посредством ограничаващата греда наляво – при отпускане на бутона спира моментално;
При натискане на бутон № 2 съоръжението се придвижва в обратна посока т.е. надясно по релсата;
Ограниченията и в двете посоки се намират в двата края на релсата от двете страни на опорната колона на телескопа, достигането на които не е желателно;
При натискане на бутон № 3 платформата се завърта наляво около осста си т.е. се отдалечава от телескопа. Със същия бутон се осъществява и паркирането на количката при положение, че тя се намира от вътрешната страна на релсата и спуснати първично и второ рамо до крайно положение. Натиска се до тогава докато се чуе специфичен звук и светване на индикацията за паркирана количка на спомагателното таблоза управление на телескопа.
Вратичката на кабината може да се отвори чрез завъртане на кръглата дръжка, намираща се от външната страна не вратата й само при паркирано положение. Отварянето на вратата при непаркирано положение може да стане чрез натискане на лостчето намиращо се от вътрешната страна на вратата по посока на командното табло т.е. надясно и едновременно завъртане на дръжката.
При натискане на бутон № 8 се осъществява повдигането на първичното рамо. След като се задейства движението посредством бутона, автоматично светва бутон № 9, който служи за спускане на същото рамо. Натиска се непрекъснато докато бутона изгасне, което ще рече че платформата е заела първоначално положение.
При натискане на бутон № 6 се осъществява движение нагоре с вторичното рамо, след което автоматично светва бутон № 7 аналогично той служи за връщане на рамото в нормално (долно) положение, след което той изгасва.
Да се внимава и при двата случая, че след като изгаснат светлините в бутоните № 9 и 7 т.е. рамената са слезли в нормално положение не трябва да се държат натиснати, тъй като се получава пренатоварване на помпите и маслото, което довежда до повреда в уплътнителните устройства.
По средата на таблото има въртящ регулатор за осветеноста на арматурата и се наглася по желание на наблюдателя.
УПЪТВАНЕ ЗА ОБСЛУЖВАНЕ
Техническа документация на “ВИЛАТИ” 430281 - 12
Телескопът се управлява ръчно от пултовете или програмно от ЦИМ. И в двата случая изчислителното устройство работи за пресмятането на координатите.изчислителят “δ” пресмята положението на деклинационната ос в ° , ‘, “ по данни на намиращия се върху оста датчик на ъгъла, тип WMS 106 PV, а също така пресмята различни корекции – например рефракцията.
Изчислителят “τ” пресмята положението на часовата ос в h, m, s и корекциите, по датчик от същия тип намиращ се в/у часовата ос. Импулсният часовник /...../ - θ – изчислителя пресмята с помощта на опорни импулси от кварцов генератор звездното време θ в h, m, s. Точността на часовника зависи от точността на опорните сигнали.
Изчислителят “α” пресмята разликата θ – τ, т.е. ректасцензията: α = θ – τ
|
движение |
скотрост |
|
G1 |
120 °/мин |
|
G2 |
10 °/мин |
|
F1 |
2 °/мин |
|
F2 |
10 ’/мин |
|
Fst |
1,5 ’/мин |
Устройството променя резкостта на изображението посредством движение на вторичните огледала.
1.3. Управляване на затвора на касетата.
Позволява ръчно или автоматично отваряне и затваряне на касетата.
В случай на ръчно управление затворът се управлява с бутон от пулта.
В автоматичен режим времето за експониране се задава програмно. Затворът се отваря ръчно с бутона, а се затваря автоматично след изтичане на определеното време.
1.4. Управление на купола и пердето.
Осъществява се ръчно от пултовете или от ЦИМ. Полжението на купола се отчита от датчик WMS 106 PV, а на пердето от механичен датчик.
Елементи на управлението:
|
Купола вдясно |
Купола вляво |
|
Процеп отворен |
Процеп затворен |
|
Перде горе |
Перде долу |
Възможно е синхронизирането на движението на купола и пердето с това на телескопа (тази функция не работи).
Часовият механизъм, управляващ стъпковия двигател на оста “α” се захранва с честота 50 Hz. За следене на космическо тяло с неголяма по отношение на Земята ъглова скорост е предвидено изменение на захранващата честота от 47.5 до 52.5 Hz, което прави блокът NAKOSTA /следене на космически станции/.
Деклинационната ос може да измени скоростта си на въртене в пределите от 0 до 0.75’/мин. Това върши блокът NAKOSTA “δ” също посредством промяна на честотата на импулсите, подавани на стъпковия двигател тип IPS-5
Оптически уред потдържащ изображението на даден обект в центура на огледалото. Изработва сигнали за корекция на грешката.
Осъществява се по двете оси от мотор IPS-5. Управлява се от пулта с бутони.
Насочва телескопа в точка с дадени координати. Управление – ръчно или от ЦИМ.
Ръчно управление – от пулта. Абсолютната стойност на моментния ъгъл се изчислява от броячите на координатоизчислителя, а отчетите на датчика на нарастването IGR съдържат относителния ъгъл. Тази величина може да се покаже на дисплея на пулта.
Автоматично управление – по отношение на измерването на ъглите може да се раздели на два момента.
“Абсолютен” – отчита абсол. Стойности на координатите. Програмира се желаната точка /α, δ/. След сигнал “СТАРТ”, телескопът отива в това направление винаги по най–краткия път. За това трябва да се има предвид ограниченията по α и δ. При достигането им телескопът спира и е необходимо в ръчен режим да се изведе от това положение и отново да се програмира. Максималната скорост в този режим е G1.
“Диференциален” режим – задаване на координатите по отношение на някакъв нулпункт. След всяко насочване крайното положение може да се приеме за нулево – чрез изчистване на блояча с бутон. Началото може да бъде и фиксирано. Най – голямата скорост е F1.
-
Осигурява връзката м/у машината тип KSR 4100 и оправлението на телескопа. Дава възможност на ЦИМ да прочете или напише данните от управлявашите регистри.
Свързва четеца тип R 40 с управлението и гарантира, че данните записани на перфолентата в ISO – код достигат до желания регистър.
Управлението е възможно от три пулта: главен – HP /Haupt Pult/, пулт в количката – BP /Bühne Pult/, и пулт в куде-помещението CP /Coude Pult/.
На пултовете са изведени екрани /дисплеи/, на които може да бъде извикано съдържанието на всеки регистър. Адресът на регистъра се набира чрез зъбни броячи намиращи се до всеки от екраните.
На пултовете има органи за тяхното включване и изключване. /HP и BP/, потенциометри за осветлението на пултовете, регулируемо осветление на работната маса, звуков сигнал за грешки в управлението и авариен стоп /АВОСТ/.
Клавиатурата на пултовете съдържа: сигнални лампи /индикация/, шалтери с две устойчиви положения /потъващи/, превключватели /непотъващи/. Обозначение на позициите на клавиатурата – редове от A до I и стълбове от 1 до 26. Позицията по стълбове е възможна и м/у двата стълба.
Функция на бутоните на пултове HP и BP:
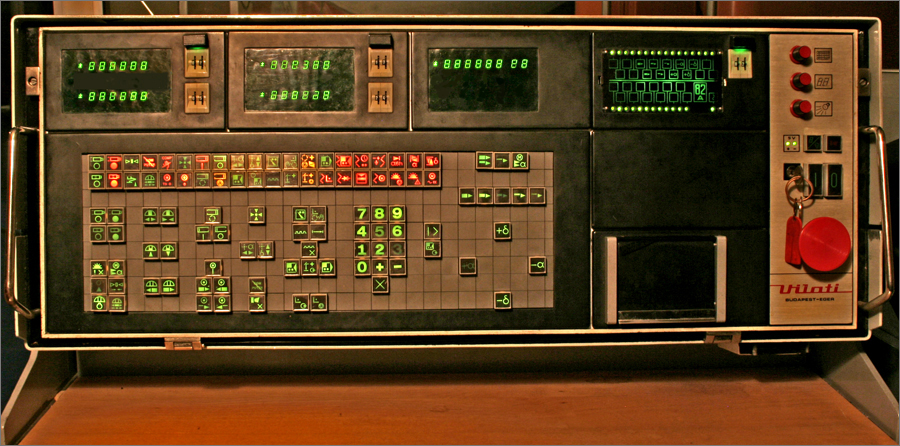
Главният пулт в операторската кабина (Haupt Pult - HP)
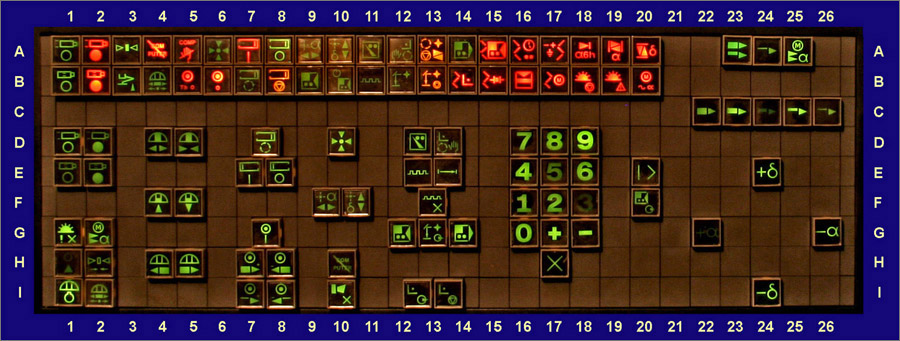
Схема на бутоните и сигналните лампи на пултове HP и BP
(уголемен вариант на схемата в нов прозорец)
D1 – отваряне клапата на тубоса.
D2 – затваряне клапата на тубоса.
E1 – отваряне на куде клапата.
E2 – затваряне на куде клапата.
G1 – снемане ограничението по хоризонт.
G2 – синхронизирано часово движвние.
H1 – основно положение на телескопа.
H2 – привеждане сачмения шпиндел в средно положение.
I1 – включване на подкуполното осветлление.
I2 – синхронно движение на телескопа и купола.
D4 – отваряне на
процепа.
D5
– затваряне на процепа.
F4
– отваряне на пердето.
F5
– затваряне на пердето.
H4
– купол надясно / по отношение на HP к.м. /.
H5
- купол наляво / по отношение на HP к.м. /.
D7.5
– автоматична експонация .
H7
– изместване вторично огледало зад средно положение /грубо ”+” фокусиране/.
H8
- изместване вторично огледало пред средно положение /грубо ”-” фокусиране/.
I7
– точно ”+” фокусиране.
I8 - точно ”-”
фокусиране.
E7
– отваряне на затвора на фотокасетата.
E8
- затваряне на затвора на фотокасетата.
G7.5
– включване на блока за фокусиране.
F9.5
– включване NAKOSTA “α”.
F10.5
- включване NAKOSTA “δ”.
D10
– фотогид – включване.
H10
– ЦИМ изключена.
I10
– изключване на сигнализацията за грешка.
D12.5
– включване на измерването на координатите.
D13.5
- полуавтоматично включване на измерването на координатите.
E12.5
– диференциален режим на измерване на координатите.
E13.5
- абсолютен режим на измерване на координатите.
F13
– установяване нулпункта в режим “диференциално”.
G12
– ввод на данни.
G13
– координатно измерване – СТАРТ.
G14
– извод на данни – СТАРТ.
I12.5
– насочване на телескопа – СТАРТ.
I13.5
- насочване на телескопа – СТОП.
D16,
17, 18 – цифри – 7, 8 ,9.
E 16, 17, 18 –
цифри – 4, 5, 6.
F16,
17, 18 – цифри - 1, 2, 3.
H17
– чистене на наборния рагистър.
E20
– включване на цифровата клавиатура.
F20
– ввод на данни в регистрите на пулта.
C22
– движение G1
C23 – движение G2
C24 – движение F1
C25 – движение F2
C26 – движение Fst
E24
– направление “+ δ”
I24 - направление “- δ”
G22 - направление “+ α”
G26- направление “- α”
Функция на сигналните лампи – пултове HP и BP:
A1 – клапата на тубоса е отворена.
A2 - клапата на тубоса е затворена.
A3 – сачменият шпиндел е в средно положение.
A4 – ЦИМ е изключена /ръчен режим/.
A5 - ЦИМ е включена /програмируем режим/.
A6 – Фотогид – включен.
A7 – експонация на касетата /затворът е отворен/.
A8 – затворът на касетата е затворен.
A9 – включено е движението NAKOSTA “α”.
A10 - включено е движението NAKOSTA “δ”.
A11 – включено е измерването на координатите.
A12 – полуавтоматичен режим на насочване.
A13 – край на програмираното насочване.
А14 – извод на данни
A15 – грешки в паритета.
A16 - грешки в цифровия часовник.
A17 - грешки в напреженията.
A18 – до крайно положение на оста α остават 6 часа.
A19 – крайно положение по α.
A20 - крайно положение по δ.
A23 – грубо/ точно движение.
A24 – най- точно движение.
A25 – синхронизирано движение на часовата ос.
B1 – куде клапата е отворена.
B2 - куде клапата е затворена.
B3 – основно /изходно/ пложение на количката.
B4 – движението на купола е синхронизирано с телескопа.
B5 – термостатът на фокусиращия блок е изключен.
B6 – фокусиращия блок е изключен.
B7 – експонирането е автоматично.
B8 – край на автоматично експониране.
B9 – ввод на данни.
B10 – готовност за ввод на данни.
B11 – диференциален режим на измерване.
B12 – тече измерване на координатите.
B13 – край на измерване на координатите.
B14 – грешки в насочването.
B15 - грешки в кварцовия генератор.
B16 – няма налягане в маслената инсталация.
B17 - грешки в задвижването
B18 – тубосът е на 4° от хоризонта.
B19 – тубосът е на 12° от хоризонта.
B20 – захранването на мотора на оста α става с 50 Hz от мрежата.
Функция на бутоните – CP (Куде-пулта):
Бутони и сигнални лампи на Куде-пулта (CP)
D2 – спектър за сравнение - включен.
D3 – калибровка – включване.
E2 – разширение
на спектъра.
E3
– включване на експонометъра.
F2
- включване на “ДЕРОТАТОР1”.
F3
- включване на “ДЕРОТАТОР2”.
H2
– касета – отваряне.
H3
- касета – затваряне.
D6
– ЦИМ е изключена.
F6
– привеждане на сачмения шпиндел в средно положение.
H6 –
гасене на сигналните лампи и звука.
D9.5 – включване на фокусиращия блок.
E9
– грубо фокусиране” + ”.
E10
- грубо фокусиране” - ”.
F9
- точно фокусиране” + ”.
F10
- точно фокусиране” - ”.
H9
– включване на движение NAKOSTA “α”.
H10
- включване на движение NAKOSTA “δ”
D12.5
– измерване на координатите.
D13.5
– полуавтоматично насочване.
E12.5
- диференциален режим на измерване на координатите.
E13.5
- абсолютен режим на измерване на координатите.
F13
– нулпункт на диференциално измерване на координатите.
G12
–ввод на данни СТАРТ.
G13
– измерване на координатите СТАРТ.
G14
- извод на данни СТАРТ.
I12.5
– насочване старт.
I13.5
– насочване край.
E20
– включване на цифровата клавиатура.
F20
- ввод на данни от цифровата клавиатура.
C22.5
- движение G2
C23.5
- движение F1
C24.5
- движение F2
C25.5
- движение Fst
Функция на сигналните лампи – CP (Куде-пулта)
A1 – отклоняващото огледало не е в лъча.
A2 – затвора зад процепа е затворен.
A3 – клапата зад процепа /на стената/ е затворена.
A4 – колиматорът не е на мястото си /за малкия колиматор/.
A5 – решетката е закрита.
A6 – огледалото е закрито.
A7 – блокът за фокусиране е изключен.
A8 – ЦИМ е изключена.
A9 – сачменият шпиндел е в средно положеие.
A10 - включено е движението NAKOSTA “α”.
A11 – включено е движението NAKOSTA “δ”.
A12 – тече измерване на координати.
A13 – край на програмираното насочване.
A14 – край на програмирано насочване.
А15 – извод на данни
A16 – грешки в паритета.
A17 - грешки в цифровия часовник.
A18 - грешки в напреженията.
A19 – до крайно положение на оста α остават 6 часа.
A20 – крайно положение по α.
A21 - крайно положение по δ.
A23 – грубо/ точно движение.
A24 – най- точно движение.
A25 – синхронизирано движение на часовата ос.
B1 – клапата на касетата е отворена.
B2 – клапата на касетата е затворена.
B3 – експонометърът е включен.
B4 – камера №1 е готова за работа.
B5 – камера №2 е готова за работа.
B6 – камера №3 е готова за работа.
B7 – движението на купола е синхронизирано с телескопа.
B8 – автоматично управление ЦИМ е включена
B9 – фотогид – включен.
B10 – ввод на данни.
B11 – готовност за ввод на данни.
B12 – диференциален режим на измерване.
B13 – тече измерване на координатите.
B14 – край на измерване на координатите.
B15 – грешка в напреженията
B16 - грешки в кварцовия генератор.
B17 – няма налягане в маслената инсталация.
B18 – тубосът е на 4° от хоризонта.
B19 – тубосът е на 12° от хоризонта.
B20 – часовникът сезахранва с 50 Hz от мрежата.
3. АДРЕСНА СИСТЕМА НА РЕГИСТРИТЕ НА УПРАВЛЕНИЕТО
АДРЕСИ НА ЦЕНТРАЛНИТЕ РЕГИСТРИ
(1) – Einschveibbar /записване/, (2) – auslesbar /четене/.
|
Позиция на платката |
Функция |
Адрес
|
|
А312 |
контролен регистър 1 |
77 (1-0) |
|
А517 |
θ - резултат |
01 (1-0) |
|
А429 |
τ- резултат |
02 (0) |
|
А529 |
α – резултат(h, m, s) |
03 (0) |
|
A528 |
α – резултат (m, s, 1/10 s) |
04 (0) |
|
А329 |
δ – резултат (° ‘, “) |
05 (0) |
|
А420 |
τ – данни на брояча WMS 106 PV |
06 (0) |
|
А428 |
τ – рефракция |
07 (1-0) |
|
А419 |
δ - данни на брояча WMS 106 PV |
08 (0) |
|
А328 |
δ – рефракция |
09 (1-0) |
|
А618 |
регистър на състоянието 1 |
85 (0) |
|
А619 |
регистър на състоянието 2 |
86 (0) |
|
А620 |
регистър на състоянието 3 |
87 (0) |
|
А628 |
команден регистър 1 |
80 (0-1) |
|
А515 |
брояч на положение на купола |
14 (0) |
|
А625 |
команден регистър 2 |
81 (0-1) |
|
А412 |
положение на пердето |
16 (0) |
|
А517 |
положение на фокуса |
17 (0) |
|
А622 |
команден регистър 3 |
82 (0-1) |
|
А410 |
време на експонация |
19 (1-0) |
|
А510 |
NAKOSTA α |
20 (1-0) |
|
А610 |
фотогид α |
21 (1-0) |
|
А710 |
фотогид δ и NAKOSTA δ |
22 (1-0) |
|
B308 |
В. δинкр IST |
23 (0) |
|
B302 |
В. δ so11 (задаване на δ) |
24 (1-0) |
|
B408 |
A IST (m, s, 1/10 s) |
25 (0) |
|
B413 |
A so11 (m, s, 1/10 s) |
26 (1-0) |
|
B402 |
α so11 (h, m, s) |
27 (1-0) |
|
B518 |
данни по диференциално измерване |
28 (1-0) |
|
B309 или B622 |
контролен регистър 2 |
78 (1-0) |
|
B509 |
В. δ so11. IST (в дъгови секунди) |
30 (0) |
|
B504 |
A. α so11. IST (в дъгови секунди), /100-105/ |
31 (0) |
|
B505 |
В. δ A. α so11. IST (в дъгови секунди), /106-107/ |
32 (0) |
4. ФУНКЦИИ НА ОБОРУДВАНЕТО ЗА УПРАВЛЕНИЕ
НА ТЕЛЕСКОПА.
4.2. Координатен изчислител (KSzM), цифров часовник (D I0) и централен честотен генератор (KFO)
Главното предназначение на KSzM, D I0 и KFO е да направи възможно установяването на осите на телескопа. KSzM дава в съответната дименсия отклонението на осите α, δ от основното им положение (оста α има възможност за 1.75 оборота- ограничение, наложено от усукването на кабелите- при 90° или 6h. до крайното положение свети сигнал [α 6 h] ).
D I0 ичислява с помощта на опорните сигнали от KFO звездното време. KSzM изчислява по величината от D I0 и τ ъгъла на ректасцензия.
4.3. Синхронно предаване на ъглови данни (SzHA).
SzHA формира паралелните сигнали от датчиците WMS106pv в последователни, предава ги в управляващия шкаф А04, където те отново се преобразуват в паралелни. SzHA предава също сигналите от диференциалните датчиици IG усилени в А04.
4.4. Програмируем делител на честота (FOP).
В документация № 430181-12
С негова помощ се задвижва затворът на фотокасетата.
При натискане на бутона[ОТВАРЯНЕ НА КАСЕТАТА]специален мотор управляван чрез релета 1RV от А01 отваря затвора на касетата. След това светва сигнал [касетата е отворена]. Този сигнал привежда (тригер на платка К2382-01) от положение “1” в “0”.
Операторът може да затвори касетата с бутонa [ЗАТВАРЯНЕ НА КАСЕТАТА]. Така друг тригер на същата платка заема положение “1” и сигналът отива в намиращото се в шкаф А01 реле 2RV, което включва мотора за затваряне на касетата. След това светва сигнал [КАСЕТАТА Е ЗАТВОРЕНА и КРАЙ НА ЕКСПОНАЦИЯТА]. Последния се гаси с бутона [ГАСЕНЕ НА СИГНАЛИТЕ](H6 в CP и I10 в HP и BP). Едновременно със сигнала [КРАЙ НА ЕКСП.] се подава и звуков сигнал, който се изключва със същия бутон[ГАСЕНЕ НА СИГН.].
При автоматичен режим трябва да се натисне бутона [АВТОМАТИЧНО ЕКСПОНИРАНЕ] и да се зададе чрез FOP-04 времето на експозинация в секунди.(за подробности – док. № 430183-12)
Чрез натискане на бутона[ОТВАРЯНЕ НА ЗАТВОРИТЕ] касетата се отваря по описания начин и започва отчитане на времето.
При изтичане на определеното време за експониране—изпраща импулс, който прекъсва процеса така, както при натискане на бутона [ЗАТВАРЯНЕ НА КАСЕТАТА].
Осъществява се чрез изменение на положението на вторичното огледало. Величината на отклонението по отношение на механично фиксирано средно положение е 50 мм . Средното положение се отбелязва чрез сигнал на датчика на нарастването IGR, който отчита нарастването на отклонението. Отклонение ит 1мм възбужда в Z-канала на IGR 200 импулса, вследствие на което на изхода на дискриминатора се появяват 100 импулса (използуват се ½ от дадените). Така отклонението се отчита през 0.01мм
Величината на отклонението се отчита от намиращия св на платка К2370-05 5- декаден ВСD-брояч в стотни от мм. Съдържанието на брояча мойе да се изведе на екрана на пулта от регистър 17.
На пулта свети знак , когато шалтерът S15 е изключен и огледалото е зад средното положение (по отношение на главното огледало-к.м.). Знак свети, когато е изклюяен шалтррът S16, а огледалото е под границата 50 мм. Когато огледалото е непосредствено в средно положение (50мм), не свети никаква индикация.
Фокусирането се провежда по следния начин:
- с помощта на намиращите се в А01 шалтери РР 11 се включва отоплението на термостата на IGR-датчика (термостата поддържа необходимата за работата на датчика температура);
- натиска се бутонът ФОКУСИРАНЕ ВКЛЮЧЕНО, с което се деблокира мотора на огледалото и се подава напрежение в IGR;
- довежда се огледалото в средно положение, ако не е там. Тогава броячът почва да отчита отклоненията;
- след фокусирането се отпуща (с повторно натискане) шалтера ФОКУС ВКЛЮЧЕН. С това се блокират моторите, задвижващи огледалото;
- ако утплението на IGR пречи на наблюдението той се изключва.
4.7. ПРОГРАМИРАНЕ НА ДВИЖЕНИЕ NAKOSTA α:
Часовото движение на телескопа се осъществява с помощта на 50 Нz трифазен управляващ импулс. Скоростта на движение може да се управлява чрез промяна на честотата между 47.5 и 52.5 Нz (това е т.н. лунно-планетно движение).
Необходимата честота се задава от програмеруем делител на честота F0Р трябва да се програмира между 285 и 315 Нz (опрната честота която се дели се задава с кварцов генератор и е 1 МНz,к.м)
4.7.1. Програмиране на F0Р
f накα = f FOP/6 = 106/(6.K.10x)
Програмно се задава коефициента на делене K и x.
K.10x = 106/(6. f накα) = (106/20).(1/ω) = 50000/ ω΄/min !
При нормална скорост на въртене ωтел = 15΄/min и fнакα = 50Hz или ωтел = 0,3 fнакα. Следователно границите на изменение на ω ще бъдат 15,75 и 14,25΄/min. Съответно f се мени от 52.5 до 47.5 Hz.
Границите, в които се мени коефициентът K са:
K.10x = 106/ (6. 52,5) = 3175.100
K.10x = 106/ (6. 47,5) = 3509.100
При програмирането величината X се задава с X=0!
В пределите на изменение на честотата последната може да се задава в 334 стъпки. Отклонението от желаната честота съставлява 0.0015% от вътр. точност на кварцовия генератор.
Пограмирането на F0Р става чрез набиране на клвишите на пулта, нужния коефицент К, X=0 и адреса на регистъра на F0Р .
При набиране на команда, преди “К” винаги се пише “0”!
Пример: необходимо е следене на обект със собствена скорост ω=14.76’/мин. По таблицата по долу на тази скорост съответствува на К=3384. Адресът на регистъра NAKOSTA α е 20.
Програма: + 03387 о 20
(К x Адр.)
NAKOSTA a - ТАБЛИЦА ЗА ОПРЕДЕЛЯНЕ НА
КОЕФИЦИЕНТА ‘К’
|
ω’/мин |
f [Нz] |
К |
ω’/мин |
f [Нz] |
К |
|
14.25 |
47.5 |
3509 |
15.03 |
50.1 |
3327 |
|
14.23 |
47.6 |
3501 |
15.06 |
50.2 |
3320 |
|
14.31 |
47.7 |
3494 |
15.09 |
50.3 |
3313 |
|
14.34 |
47.8 |
3487 |
15.12 |
50.4 |
3307 |
|
14.37 |
47.9 |
3479 |
15.15 |
50.5 |
3300 |
|
14.40 |
48.0 |
3472 |
15.18 |
50.6 |
3294 |
|
14.43 |
48.1 |
3465 |
15.21 |
50.7 |
3287 |
|
14.46 |
48.2 |
3458 |
15.24 |
50.8 |
3281 |
|
14.49 |
48.3 |
3450 |
15.27 |
50.9 |
3274 |
|
14.52 |
48.4 |
3444 |
15.30 |
51.0 |
3268 |
|
14.55 |
48.5 |
3436 |
15.33 |
51.1 |
3262 |
|
14.58 |
48.6 |
3429 |
15.36 |
51.2 |
3255 |
|
14.61 |
48.7 |
3422 |
15.39 |
51.3 |
3249 |
|
14.64 |
48.8 |
3415 |
15.42 |
51.4 |
3242 |
|
14.67 |
48.9 |
3408 |
15.45 |
51.5 |
3236 |
|
14.70 |
49.0 |
3401 |
15.48 |
51.6 |
3230 |
|
14.73 |
49.1 |
3394 |
15.51 |
51.7 |
3224 |
|
14.76 |
49.2 |
3387 |
15.54 |
51.8 |
3217 |
|
14.79 |
49.3 |
3381 |
15.57 |
51.9 |
3211 |
|
14.82 |
49.4 |
3374 |
15.60 |
52.0 |
3205 |
|
14.85 |
49.5 |
3367 |
15.63 |
52.1 |
3199 |
|
14.88 |
49.6 |
3360 |
15.66 |
52.2 |
3193 |
|
14.91 |
49.7 |
3353 |
15.69 |
52.3 |
3187 |
|
14.94 |
49.8 |
3347 |
15.72 |
52.4 |
3181 |
|
14.97 |
49.9 |
3340 |
15.75 |
52.5 |
3176 |
|
15.00 |
50.0 |
3333 |
15.78 |
52.6 |
3169 |
4.8. УПРАВЛЕНИЕ НА СТЪПКОВИТЕ МОТОРИ НА 2м ТЕЛЕСКОП.
На 2м телескоп има 2 стъпкови двигателя IPS-5, които изпълняват различни функции на дветв оси;
- ос α : фотоелектрична корекция; NAKOSTA и най-точно водене
- ос δ : фотоелектрична корекция; най-точно водене.
(движението NAKOSTA δ се осъществява от двигателя δ на фотогида).
За изпълнението на различните функции са необходими различни скорости, които се задават чрез промяна честотата на моторите. Изходната честота на FOP зависи от зададения делител, затова на всяка скорост има пределен делител.
При най-точно движение, ъгловата скорост на осите е ω= 1.5’/мин.
Обороти на мотора: N=900 oб/min = 15 oб/сек
1 оборот на двигателя IPS-5 = 240 импулса
15 об/сек. = 240 x 15 = 3600 Hz = 3.6 kHz
Делител: К= 106/3600 = 277.77
Тъй като на FOP може да се подаде само цяло число като делител, избрано е К= 277. В такъв случай честотата е 3610.1083 Hz и оборотите са 15.042 об/сек. или 902.52 об/мин, а ъгловата скорост в действителност е ω= 1.5042’/мин
Стойността на делителя е фиксирана и не може да се променя .
Управлението с това движение става с бутон от пулта.
4.8.2. ПРОГРАМИРАНЕ НА ДВИЖЕНИЕ NAKOSTA δ:
Ъгловата скорост на оста δ може да се изменя в пределите от 0.002’/мин до 0.75’/мин. (долната граница не е нула , тъй като тогава делителя би бил “∞”)
За движвние със скорост 0.75’/мин са необходими 1800 Hz. FOP делителя получава опорна честота 100 kHz( а не 1 МHz, защото в последния случай коеф. за долната граница би имал повече разряди от възможните в регистъра). Следователно необходимият делител е:
К = 105/1800 = 55.555. Избран е делител К = 55.
При К=55 действителната честота е 1818.1818 Hz и ω = 0.7577’/мин.
За долната граница на скоростта е избран K =20000 и тогава ω = 0.002083’/мин.
Желаната ъглова скорост се задава програмно с коефицент К между 55 и 20 000. Програмирането се извършва, както в случая α. Моторът се вклюява при натискане на бутона NAKOSTA δ. На скорост 1’/мин . би съответствувал К=41.667, следователно К може да се изчисли лесно по формулата:
К.10x = 41.667/ω
Например за скорост ω =0.5/мин., К= 83.10 градуса. При тази замяна действителната скорост ще бъде ω = 41.667/83 = 0.5002’/мин. Програмата на FOP ще бъде
+/- 00083 0 22
(К х Адр.)
И при NAKOSTA δ степента “х” е винаги нула!
NAKOSTA d - ТАБЛИЦА ЗА ОПРЕДЕЛЯНЕ НА
КОЕФИЦИЕНТА ‘К’
|
ω тел. |
f |
К |
ωтел. |
f |
К |
ω тел |
f |
К |
|
0.002 |
4.8 |
20833 |
0.19 |
456 |
219 |
0.53 |
1272 |
79 |
|
0.0025 |
6 |
16667 |
0.2 |
480 |
208 |
0.54 |
1296 |
77 |
|
0.003 |
7.2 |
13889 |
0.21 |
504 |
198 |
0.55 |
1320 |
76 |
|
0.0035 |
8.4 |
11905 |
0.22 |
528 |
189 |
0.56 |
1344 |
74 |
|
0.004 |
9.6 |
10417 |
0.23 |
552 |
181 |
0.57 |
1368 |
73 |
|
0.0045 |
10.8 |
9295 |
0.24 |
576 |
174 |
0.58 |
1392 |
72 |
|
0.005 |
12 |
8333 |
0.25 |
600 |
167 |
0.59 |
1416 |
71 |
|
0.0055 |
13.2 |
7576 |
0.26 |
624 |
160 |
0.6 |
1440 |
69 |
|
0.006 |
14.4 |
6944 |
0.27 |
648 |
154 |
0.61 |
1464 |
68 |
|
0.0065 |
15.6 |
6410 |
0.28 |
672 |
149 |
0.62 |
1488 |
67 |
|
0.007 |
16.8 |
5952 |
0.29 |
696 |
144 |
0.63 |
1512 |
66 |
|
0.0075 |
18 |
5555 |
0.3 |
720 |
139 |
0.64 |
1536 |
65 |
|
0.008 |
19.2 |
5208 |
0.31 |
744 |
134 |
0.65 |
1560 |
64 |
|
0.0085 |
20.4 |
4902 |
0.32 |
768 |
130 |
0.66 |
1584 |
63 |
|
0.009 |
21.6 |
4630 |
0.33 |
792 |
126 |
0.67 |
1608 |
62 |
|
0.0095 |
22.8 |
4386 |
0.34 |
816 |
123 |
0.68 |
1632 |
61 |
|
0.01 |
24 |
4167 |
0.35 |
840 |
119 |
0.69 |
1656 |
60 |
|
0.02 |
48 |
2083 |
0.36 |
864 |
116 |
0.7 |
1680 |
60 |
|
0.03 |
72 |
1389 |
0.37 |
888 |
113 |
0.71 |
1704 |
59 |
|
0.04 |
96 |
1041 |
0.38 |
912 |
110 |
0.72 |
1728 |
58 |
|
0.05 |
120 |
833 |
0.39 |
936 |
107 |
0.73 |
1752 |
57 |
|
0.06 |
144 |
694 |
0.4 |
960 |
104 |
0.74 |
1776 |
56 |
|
0.07 |
168 |
595 |
0.41 |
984 |
102 |
0.75 |
1800 |
56 |
|
0.08 |
192 |
521 |
0.42 |
1008 |
99 |
|
|
|
|
0.09 |
216 |
463 |
0.43 |
1032 |
97 |
|
|
|
|
0.1 |
240 |
417 |
0.44 |
1056 |
95 |
|
|
|
|
0.11 |
264 |
379 |
0.45 |
1080 |
93 |
|
|
|
|
0.12 |
288 |
347 |
0.46 |
1104 |
91 |
|
|
|
|
0.13 |
312 |
321 |
0.47 |
1128 |
89 |
|
|
|
|
0.14 |
336 |
298 |
0.48 |
1152 |
87 |
|
|
|
|
0.15 |
360 |
278 |
0.49 |
1176 |
85 |
|
|
|
|
0.16 |
384 |
260 |
0.5 |
1200 |
83 |
|
|
|
|
0.17 |
408 |
245 |
0.51 |
1224 |
82 |
|
|
|
|
0.18 |
432 |
231 |
0.52 |
1248 |
80 |
|
|
|
Движенията NAKOSTA имат свои особености:
NAKOSTA α – часовата ос се движи с желената скорост само тогава, когато е включено синхронното движение (бутон G2 на НР и ВР) и едновременно е натиснат бутон NAKOSTA α . При освобождаване на последния движението продължава с нормална скорост 15’/мин.
NAKOSTA δ – тъй като работният регистър за движенията NAKOSTA δ и фотоел. корекция δ е един и същ – адрес 22, то не може едновременно да се въвеждат двете движения (едното изключва другото).
Коригира грешките в положенията на осите. Величината на грешките се характеризира с число между 20000 и 55. Повреме на корекцията се променя скоростта на въртене на осите в зависимост от величината на грешката. Блокът фотогид формира знака на корекцията, характерното число и адреса на регистъра, където трябва да се запишат коригиращите команди, напр. +/- 07863 21. Регистрите по α и δ са различни за α- адрес 21, за δ – адрес 22.
Стъпковите двигатели могат да се изключват програмно (когато няма сигнал за грешки), като данните в регистъра са без знак, напр. 20000 22.
4.8.4. УПРАВЛЕНИЕ НА СТЪПКОВИТЕ ДВИГАТЕЛИ IPS-5
Управлението е така организирано, че НАЙ-ТОЧНОТО движение има предимство пред NAKOSTA и ФОТОГИД – движенията. Това означава, че когато са включени NAKOSTA δ и ФОТОГИД при натискане на бутона +/- НАЙ-ТОЧНО δ, моторът на NAKOSTA и ФОТОГИД спира и движението продължава със скорост Fst. При отпускане на бутона Fst движението продължава в предишното направление с предишната скорост.
При едновременно натискане на бутоните NAKOSTA и ФОТОГИД и +/- Fst двигателят спира. Направлението на движение може да се промени само при спрян двигател.
4.9. ЧЕТЯЩО УСТРОЙСТВО, тип 0I -1
Записаните на перфолента данни могат да бъдат вкарани в централните регистри на управлението с помощта на четеца интерфейс 0I -1.
Четецът може да се включи с бутона ВВОД-СТАРТ (G12) в случай, че сигналът ВВОД-ГОТОВНОСТ (В10) е налице. (За подробности вж. документация № 430184-120)
РЕ получава предварително програмораните указания за движение на телескопа и изпълнява командите за движение, насочване. На РЕ също се дават указания за скорост при насоочване – ГРУБО или ТОЧНО.
РЕ не работи с ЧАСОВО ДВИЖЕНИЕ и НАЙ-ТОЧНО ДВИЖЕНИЕ, които са напълно независими от РЕ.
РЕ основно има 2 режима на работа:
“А” – директно ( чрез бутони) управление на насочване.
В този режим РЕ изпълнява само препратените от регистрите команди за движение. В командните регистри командите могат да се подават от пулта и от сметачната машина и непосредствено да управляват движението.
От получените команди РЕ формира команди за НАСОЧВАНЕ , СТАРТ и СЪЕДИНЕНИЕ (Kupplung- befehle), както и код за скорост на движение при насочване към обекта.
В този режим могат да се извършат операциите: РЪЧНО НАСОЧВАНЕ, “ ПОСТАВЯНЕ В ИЗХОДНО ПОЛОЖЕНИЕ”, “ПРИВЕЖДАНЕ САЧМЕНИЯ ШПИНДЕЛ В СРЕДНО ПОЛОЖЕНИЕ” и “ИЗМЕРВАНЕ НА КООРДИНАТИТЕ”.
“В” - Автоматично насочване.
В този режим РЕ насочва телескопа в дадена точка Р(α,δ), която трябва да бъде зададена в регистрите SOLL WERTES. По команда РЕ СТАРТ броячът взема командите СТАРТ, НАПРАВЛЕНИЕ, СЪЕДИНЕНИЕ, както и КОД ЗА СКОРОСТТА. Автоматично насочване е възможно от пулта, от машината и от перфочетеца.
Когато по време на насочването се наруши някое от движенията светва сигнал ГРЕШКА В НАСОЧВАНЕТО и последното се престановява. Автоматичното насочване се включва само тогава отново, когато всички условия на двете движения са налице. Сигналът ГРЕШКА В НАС се гаси с бутона ГАСЕНЕ НА СИГНАЛА.
Има два варианта на автоматично насочване : единият е насочване осъществено в абсолютна измерителна система, т.н. VORWAHL; другият е с помощта на диференциална измерителна система, т.н. STERNWECHSEL (редуване на звезди). Иборът между двете системи се осъшествява с команди АБСОЛ.(АВS) и ДИФЕР.(INKR).
В режим АБСОЛ. подаваните от координатния датчик величини за направленията на осите обозначават моментното положение на телескопа - IST-WERT. По командата РЕ СТАРТ броячът на направленията изчислява разстоянието между двата пункта и води телескопа по най-краткия път !!! В режим АБСОЛ. могат да работят движенията ГРУБО и ТОЧНО.
В режим ДИФЕР. величините ISTWERT се съдържат в брояча на дифер. измер. система. Нсочването става по начин подобен на АБСОЛ., обаче в режим ДИФЕР.са възможни само точните движения.
Автоматичното насочване може да бъде осъществено и в режими РЕ АВТОМАТ и РЕ ПОЛУАВТОМАТ.
В режим РЕ АВТОМАТ в края на насочването възниква сигнал ЧЕТЕЦ-СТАРТ, който включва четящото устройство . В режим РЕ – ПОЛУАВТОМАТ, такъв не се формира.
Блокът РЕ може да се раздели на следните главни части:
- Насочване и управление – платки В/501,511-В/516;
- Управление на задвижването и интерфейс – платки В/502-510;
- δ брояч на асочването – платки В/301-В/323;
- α брояч на насочването – платки В/401- В/423;
Схемите са в описание № 430281-14/43
4.10.1.2. ПОДРОБНО ОПИСАНИЕ НА РЕ
4.10.1.2.2. ВХОД-ИЗХОД, ЗНАЦИ НА РЕ-УПРАВЛЕНИЕТО
До РЕ се отнасят следните команди
|
КОМАНДА |
ПОЗИЦИЯ НА ПУЛТА НР (ВР) |
|
СНЕМАНЕ НА ОГРАНИЧ. ПО ХОРИЗОНТА |
G1 |
|
ПРИВЕЖДАНЕ В ИЗХОДНО ПОЛОЖЕНИЕ |
H1 |
|
ИЗМЕРВАНЕ НА КООРДИНАТИТЕ |
D12,5 |
|
РЕЖИМ РЕ ПОЛУАВТОМАТ |
D13,5 |
|
ДИФЕР. ИЗМЕР. СИСТЕМА |
E12,5 |
|
АБСОЛ. ИЗМЕР. СИСТЕМА |
E13,5 |
|
ВВОД ДАННИ-СТАРТ |
G12 |
|
ИЗМЕРВАНЕ НА КООРДИНАТИ СТАРТ |
G13 |
|
ГАСЕНЕ НА СИГНАЛИЗАЦИЯТА |
I10 |
|
РЕ-СТАРТ |
I12,5 |
|
РЕ-СТОП |
I13,5 |
|
НУЛПУНКТ НА ДИФЕР.ИЗМЕР СИСТЕМА |
F13 |
|
САЧМЕН ШПИНДЕЛ В СРЕДНО ПОЛОЖЕНИЕ |
H2 |
|
ДВИЖЕНИЕ ГРУБО 1 |
C22 |
|
ДЖИЖЕНИЕ ГРУБО 2 |
C23 |
|
ДВИЖЕНИЕ ТОЧНО1 |
C24 |
|
ДВИЖЕНИЕ ТОЧНО 2 |
C25 |
|
НАПРАВЛЕНИЕ + α |
G22 |
|
НАПРАВЛЕНИЕ - α |
G26 |
|
НАПРАВЛЕНИЕ + δ |
E24 |
|
НАПРАВЛЕНИЕ - δ |
I24 |
Преминаване през полюса (poluberchraitung) тази команда РЕ получава от командните регистри на системата за прехвърляне на данни под адреси 80, 81 и 82 ( друго обозначение- α SOLL)
Оборудването се включва към мрежата с помощта на шалтери, които са в шкаф А01.
- поставя се и се завърта ключът на НР;
- някой от бутоните ВКЛ., които са на главните пултове (панели) на шкаф А01 и А04 се натиска. Страничните пултове се включват от намиращи се на тях бутони, когато НР и шкафовете са включени.
Изключване:
- някой от бутоните ИЗКЛ на панелите на А01 и А04 се натиска.
- ключът на НР се изважда.
- обрудването се изключва от мрежата.
На всеки пулт има авариен стоп АВОСТ, с който се изключва напреженито в цялата система на управление (шкаф А01 се изключва)
Осетлението под купола се включва от бутона I1(НР и ВР) и се гаси при повторно натискане на същия бутон.
Дисплея на регистрите е на пултовете. Прочитането на съдържанието на регистрите, и показването му на дисплеите става, като се постави адреса на регистрите на съответния желан екран, с помощта на две зъбни колела. На наборния екран има светодиод , който светва при грешки в набирането на данни. Грешките, обаче не се показват, на екрана остават само верните дани.
На екрана към регистър 430170-300 има 28 светодиода, с чиято помощ се изобразява съдържанието на блоковете, които не работят в цифров вид. За тази цел се използува набора от плксигласови платки, които посочват каква величина изобразява всеки диод при избрания регистър.
Въвеждането на данни в централните блокове става от цифровата клавиатура .
- клавиатурата се включва с бутона Е20;
- желаните цифриви данни се набират последователно и могат да имат най-много 6 разряда;
- по същия начин се набират и адресите на регистрите, в които ще бъдат препратени данните;
- врността на набраните данни се контролира на екрана. Наборът се снулира с бутона ЧИСТЕНЕ – н17;
- въвеждането на данни става с бутона Р20;
- при неуспешен запис на данни в нужния регистър светва диода на екрана;
8.4. РЪЧНО УПРАВЛЕНИЕ НА ДВИЖЕНИЯ.
Осъществява се от клавишите на пулта.
Бутоните за избиране на скоростта са на позиции С22-С26, а за избиране на оста и направлението- Е24,G22,I124, G26.
Първо се избира с осочените бутони желаната скорост, след което се натиска съотвтният бутон за направление. Движението започва и на екрана светва сигнал ГРУБО-ТОЧНО, или НАЙ-ТОЧНО. Движението трае докато бутонът е натиснат.
Ако се натиснат един след друг 2 бутона за скорост или направление, управлението запазва само първата команда, с излючение на случая НАЙ-ТОЧНО движение, когато телескопът винаги спира при едновременно натискане на друг бутон за напражление.
Сачмения шпиндел (винт) на оста δ се привежда в средно положение с бутоните: Н2 за НР и ВР, и F6 за СР. Индикацията на средно положение се осъществява от сигн. лампа А3 (НР и ВР) и А9 (СР). От средното положение е възможно движение в пределите на 1.5 градуса.
(Следващия текст в магента е добавен от администратора на сайта и не е част от документацията)
НЯКОИ ОСОБЕНОСТИ ПРИ РАБОТА С ТЕЛЕСКОП НА ЗАПАД ОТ КОЛОНАТА
При ръчно движение на телескопа с клавиши ”+d” и ”-d” (съответно E24 и I24 за HP и BP) може да се преминава през небесния полюс, като движението не спира при достигането му (т.е. не спира при d = +90o). Ако телескопа е на запад от колоната, за движение в посока от полюса към екватора (например полюс - зенит - юг) трябва да се натиска бутон ”+d” (E24 за HP и BP). Това може да озадачи обучаващите се за оператори, тъй като традиционно се очаква, че за движение в тази посока трябва да се използва бутон ”-d”.
За удобство може да се приеме, че бутоните ”+d” и ”-d” определят само посоката на въртене на деклинационната ос и нямат връзка с положението на телескопа спрямо полюса.
Следват примери с извеждане на телескопа от паркирано състояние:
При система RC (телескоп под колоната):
Извеждане на изток от колоната – бутони ”-a” и ”-d”;
Извеждане на запад от колоната – бутони ”+a” и ”+d”.
При система Куде (телескоп над колоната):
Извеждане на изток от колоната – бутони ”+a” и ”-d”;
Извеждане на запад от колоната – бутони ”-a” и ”+d”.
При преминаване през полюса, стойността d, отчитана по регистър 5 (d-резултат) започва да намалява, а часовият ъгъл τ, отчитан по регистър 2 (τ-резултат) се променя с 12 часа (примерно от 18h - изток на 6h - запад).
При телескоп на запад от колоната, задаването на координати a и d на обект става по обичайния начин (знака за d не се променя).
8.5. СИНХРОННО ЧАСОВО ДВИЖЕНИЕ.
Включва се с бутони G2 на НР и ВР и движи телескопа синхронно с небесната сфера. работата на блока се индикира от сигн.лампа А25 на трите пулта.
Ако поради смущения в работата на кварцпвия генератор синхронния мотор-часовник не получава нужната честота 50.14 херца, тогава автоматично се включва мрежово захранване с 50 херца.На трите пулта тогава светва сигнал В20 и се подава звуков сигнал.
След програмирането на необходима скорост движението се включва с бутони F9.5 (НР и ВР) и Н9 (СР) при вече включено синхронно часово движение. Функционирането на NAKOSTA α се индикира: А9 (НР,ВР) и А10. Когато се изключи с повторно натискане NAKOSTA α движението продължава с нормална скорост.
След програмирането се включва с бутони F10.5(НР,ВР) и Н10-индикация А10 (НР,ВР) и А11(СР)
NAKOSTA δ и ФОТОГИД не могат да работят едновременно и ако се включат и двете движенията спират.
Ако се натисне бутонът +/- δ, тогава движението се превключва ма FSt; при отпущане на бутона отново продължава NAKOSTAδ .
БЛОК ФОКУСИРАНЕ се влючва чртез бутони G7.5(НР,ВР) и D9.5(СР). При изкл=чен блок фокус.свети сигн лампа В6(НР,ВР) и А7(СР). Управлението на фокусиращите мотори става от трите пулта
|
НР и ВР |
СР |
ФУНКЦИЯ |
|
H7 |
E9 |
+ГРУБО |
|
H8 |
E10 |
-ГРУБО |
|
I7 |
F9 |
+ТОЧНО |
|
I8 |
F10 |
-ТОЧНО |
След включване на апаратурата блока за фокусиране трябва да се провери по следния начин: на единия от екраните се изисква адрес 17. ПРИ ОТРИЦАТЕЛЕН ЗНАК на величината “положение на огледалото” последното се придвижва в направление + до СМЯНА НА ЗНАКА. Едва сега на екрана се отчита истинската величина на отклонение на огледалото от средното положение, в мм. Ако при включване знакът е положителен , огледалото се придвижва в направление минус до пресичане на средното положение.
Ако огледалото е в средата на фокусирания път НЯМА ЗНАК.
АКО блокът ФОКУС не се изключва чрез пълно изключване на управлението, при ново включване на блока не е необходима проверка.
Термостатът на блок ФОКУС може да се включи /изключи чрез намиращия се на шкаф А01 шалтер РР. ПРИ ИЗКЛЮЧЕНО ПОЛОЖЕНИЕ НА ТЕРМОСТАТА СВЕТИ ЛАМПА В5 (НР,ВР)
8.9. УПРАВЛЕНИЕ НА ЗАТВОРА НА КАСЕТАТА.
Осъществява се ръчно или автоматично от НР и ВР.
В ръчен режим – отваряне с бутони Е7 и затваряне с Е8.
В автоматичен режим отваряне с бутони Е7 при предварително натиснат бутон за автомат. режим D7.5, затваряне – автом. след определено програмирано в секунди време.
Времето на експонация се задава в регистър 19. След изтичане на това време затворът се затваря автоматично и светва сигнал В8 с едновременен звуков сигнал, които се гасят с I10 ( би следвало при АВТОМ. експонация да свети и сигнална лампа В7)
Осъществява се от НР и ВР.
С бутони Н5 и Н4- зарваряне надясно и наляво съответно ( за наблюдател, който гледа от пулта НР – к.м.).
Положението на купола може да се контролира по показанията на регистър 14 (той не работи!).
С бутони F4 и F5 се вдига и сваля пердето на процепа. Положението на пердето може да следи по регистър 16.
Процепът се отваря/затваря с бутони D4 и D5.
С натискане на бутона I2 управлението на купола се поема от ЦИМ, която синхронизира движението на купола, пердето и телескопа. Този режим се сигнализира от В4.
8.11. РЪКОВОДСТВО ЗА РАБОТА С БЛОКА ЗА НАСОЧВАНЕ – РЕ
Този блок получава команди от командните регистри. Може да се управлява от пултовете и от машината. Упътване за работа с РЕ има обозначено на клавишите на пулта и записано директно в командните регистри.
8.11.1. ПРЯКО УПРАВЛЕНИЕ НА НАСОЧВАНЕТО.
Пряко, ръчно насочване е възможно сано тогава , когато НЕ Е ВКЛЮЧЕНО АВТОМАТИЧНОТО. скоростта на движение се избира с бутони Ц22-26, а направлението – чрез +/-α и +/-δ .
От отнасящите се до една и съща ос бутони, първият натиснат блокира следващия! Движение едновременно и по двете оси е възможно и при това скоростите са еднакви (логично, тъй като бутоните за скоростите се отнасят и за двете оси-к.м.)
Сигн. лампа ГРУБО/ТОЧНО (А23) свети, когато е даден СТАРТ РЕ.
ВНИМАНИЕ ! АКО ТЕЛЕСКОПЪТ СЕ Е ДВИЖИЛ СЪС СКОРОСТИ ГРУБО 1 ИЛИ ГРУБО 2, ДВИЖЕНИЕТО В ПРОТИВНА ПОСОКА СЪС СЪЩИТЕ СКОРОСТИ Е ВЪЗМОЖНО САМО СЛЕД ОКОЛО 10 сек СЛЕД СПИРАНЕ НА ТЕЛЕСКОПА.
По време на движение по δ ГР1 и ГР2 сачмения винт се движи по направление на средното си положение от ТОЧНО1.
След импулс от бутона Н2 (привеждане на сачмения винт в средно положение) винтът отива в средно положение. Достигането на това положение се сигнализира с лампа А3 и движението на винта спира. По време на движението на винта към средата, телескопът не се движи.
С натискане на бутона Н1 телескопът се привежда в основно положение ( изходно положение), ( тубус към полюса и противотежест отдолу,к.м.) – със скорост ГР1. първо се установява оста α и едва след това започва движение по δ .
Телескопът е в основно положение докато стои команда Н1.
При достигане на основното положение движението спира.
С натискане на бутон G1 се снемат ограниченията по хоризонта и движенията стават свободни.
ИЗМЕРВАНЕТО НА КООРДИНАТИТЕ става по следния начин : телескопът е в дадена точка ( начална). Сачмени винт е в средно положение . Установява се нул-пункта на диференциалната измерителна система (Р13). Натиска се D12 и се включва измер. система.
При движение на телескопа ( възможни са скорости F и Fst) положението му по отношение на началната точка може да се отчете в регистрите на броячите (23 и 25) на диференциалната измер. система .
8.11.2. АВТОМАТИЧНО НАСОЧВАНЕ .
В този режим ТРЯБВА ОТНАЧАЛО ДА СЕ ПРОГРАМИРА РАБОТАТА НА РЕ И СЛЕД ТОВА ДА СЕ ДАДЕ РЪЧНО СТАРТ.
Ред на работа:
- ако програмата трябва да се вкара АВТОМАТ. или ПОЛУАВТОМАТ. режимът се включва от пулта . С командите АБСОЛ,( Е13.5) или ДИФЕР. (Е12.5) се избира измерителната система.
Съответните регистри са запълнени ( SOLLWERT регистри). При знак минус на Золлверта на РЕ се подава команда ПРЕХВЪРЛЯНЕ НА ПОЛЮСА, тогава телескопът достига целта преминавайки полюса . Ако знакът не е минус телескопът се насочва без да прхвърли полюса.
В режим ДИФЕР. броячите на диференциалната измерителна система трябва да се поставят на 0 преди началото на програмирането. По нататък нул-пункта може д асе установява във всяка желана точка .
Когато тези операции са изпълнени , блокът за насочване може да се включи с бутон РЕ СТАРТ (I12.5).
РЕ може да получава команди от перфолента, пулт и ЦИМ.
ПРИМЕР:
Насочване в режим АБСОЛ. (Vorwahl)
1.РЕ СТОП адрес 80 - 101/22 бита
2. АБСОЛ. --- 80 - 104/20 бита
3. δ Sо 11 --- 24- данни
4. α Sо11 --- 27 – данни команда през полюса
5.РЕ СТАРТ --- 80 - 101/23
РЕЖИМ ДИФЕРЕНЦИАЛЕН ( смяна на звездите) с изместване на изходната точка
1. РЕ СТОП адрес 80 - 101/22 бита
2.ДИФ. режим 80 - 104/21
3.нул-пункт 80 - 101/20
4.В Sо11 24 - данни
5.А Sо11 24 - данни
6. РЕ СТАРТ 80 - 101/23
Същия режим но без изместване на изходната точка – същата таблица, но без т.3 – нул-пункт.
В случай, че е поставен и режим АВТОМАТ, след завършване на насочването се подава импулс за СТАРТ ЧЕТЕЦА, а при ПОЛУАВТОМАТИЧНО ТАКАВА КОМАНДА НЕ СЕ ФОРМИРА.
Насочването може да бъде спряно по команда РЕ СТОП (I13.5) и след това отново включено с команда РЕ СТАРТ (I12.5)
8.12. СИГНАЛИЗАЦИЯ ЗА ГРЕШКИ И КРАЙ НА ОПЕРАЦИИ.
Обозначаване на грешки и край на дадена операция става със сигнални лампи и звуков сигнал. Край на операция се обозначава с ЖЪЛТИ СИГНАЛНИ ЛАМПИ И НЕПРЕКЪСНАТ ЗВУКОВ СИГНАЛ. Изключват се с бутона СИГНАЛ-НУЛ.
|
Функция |
НР, СР, ВР |
Условие |
|
Край на програмирането на насочването |
А13 А14 |
Свети, когато при насочване Програмата се прочете |
|
Край на експонацията |
В8 |
Свети при затваряне на затвора и след изтичане на определено време при автомат. работа на касетата. |
|
Край на измерването |
В13 В14 |
Свети, когато завърши измерването на положението на телескопа. |
Грешките се обозначават с червени лампи и прекъснат звуков сигнал . Изключването на сигналите става с бутона СИГНАЛ-НУЛЛ или след отстраняване на грешките .
|
Функция |
НР, СР, ВР |
Условие |
|
Грешки в паритета |
А14 А16 |
Свети когато получените от управляващия блок данни имат грешки в паритета.Гаси се само от С.НУЛЛ. |
|
Грешка в часовника |
А16 А17 |
Свети след включване на оборудването до проверка на часовника и след това ПРИ ПОВРЕДИ В ЧАСОВНИКА (например избързва) |
|
Смущения в напрежението |
А17 В15 |
Свети , когато някое от подаваните на прежения на апаратурата е грешно. Напреженията на пулта се показват от свои собствени индикатори. |
|
α 6h |
А18 А18 |
Светва 6ч преди крайното положение на оста алфа. СИГНАЛ-НУЛЛ гаси само звука, а лампата продължава да свети до извеждане на телескопа от това положение |
|
Ограничител по α |
А19 А19 |
Свети дотогава, докато оста е в крайно положение. |
|
Ограничител по δ |
А20 А20 |
Свети дотогава, докато оста е в крайно положение. |
|
Грешки в насочването |
В14 |
Свети, когато не може да бъде изпълнено прогр. насочване . С НУЛЛ изключва само звука |
|
Налягане на маслото |
В16 В17 |
Свети когато няма необходимото налягане в маслопроводите |
|
Грешки в задвижването |
В17 |
Свети, когато някой от превключвателите на задвижващите мотори е повреден. |
|
Хоризон 4 градуса |
В18 В18 |
Свети когато оста на телескопа стигне на 4 градуса от хоризонта |
|
Хоризонт 12 гардуса |
В19 В19 |
Свети когато оста на телескопа стигне на 12 градуса от хоризонта |
|
Движение на мотор-часовника, мрежа |
В20 В20 |
Свети когато мотор-часовникът се захранва с 50 херца направо от мрежата ( а не от стабилния генератор). |
След включването на управлението на телескопа ЦИМ може да чете съдържанието на централните работни регистри и да дава команди и данни за управлението на телескопа.
След натискане от някой пулт на бутона КОМПЮТЕР ИЗКЛ. светва и лампа КОМПЮТЕР ИЗКЛ. Ако бутонът КОМПЮТЕР ИЗКЛ не е натиснат, машината машината имавъзможност сама да управлява тел. При това от пулта не могат да се подават на регистрите нито команди, нито данни. В този случай свети лампа УПРАВЛЕНИЕ ОТ ЦИМ.
На ВР и СР в отделен подвижен ръчен пулт са изнесени бутони , управляващи деижението на осите, фокусирането и движението на купола.
8.15. ОБСЛУЖВАНЕ НА ШКАФА С ЦИФРОВА ЕЛ. АПАРАТУРА – т. 7.1.
8.16.
8.17. ОТОПЛЕНИЕ И ВЕНТИЛАЦИЯ НА ТЕЛЕСКОПА .
Ключът за отопление и вентилация се на мира в шкаф А01.
ОТОПЛЕНИЕ НА ПРОТИВОРОСНИКА –може да се включи с превключватели със знак РТ в три степени
ОТОПЛЕНИЕ НА ФОКЪСИРБЛОКА- превключватели РF .
ОТОПЛЕНИЕ НА ОГЛЕДАЛОТО – превключватели РS в три степени.
ВЕНТИЛАЦИЯ НА ОГЛЕДАЛОТО- превключватели РSV .
Управлява се с бутоните D2, 3;E2,3; F2,3;h2,3; на СР. Сигнални лампи за спектрографа : А1-6, В1-6
8.19. ДРУГИ ОБСЛУЖВАЩИ И СИГНАЛНИ ЕЛЕМЕНТИ.
ОСНОВНО ПОЛОЖЕНИЕ – бутонН1 на НР и ВР. След натискането му тел. остава в основно положение.
ОТВАРЯНЕ/ ЗАТВАРЯНЕ на клапата на тубуса – D1,2;А1,2;
ПРЕХВЪРЛЯНЕ НА ХОРИЗОНТА – бутон G1 – освобождава движението на телескопа от ограниченията по хоризонта. Движението е възможно само с ТОЧНИТЕ СКОРОСТИ!
ОСНОВНО ПОЛОЖЕНИЕ НА КОЛИЧКАТА – лампа В3 на НР и ВР .
8.20. ПРОВЕРКА НА ЗВЕЗДНИЯ ЧАСОВНИК.
Часовникът тябва да се проверява при всяко влючване или при забелязани грешки. Това става така: на цифровия пулт се набират времето ( с неголямо изпреварване ) и адрес 01. Когато точното време (отчитано по друг часовник или звазда-к.м.) съвпадне с набраното се натиска бутона за вкарване на данните.
8.21. КОРЕКЦИЯ ЗА РЕФРАКЦИЯТА.
Стойността на корекцията в битове за оста δ се задава на адрес 09, а за оста α в адрес 07 посредством цифровата клавиатура. Максималната корекция, която е възможна е +/-10n бита/ – к.м.
ПРИМЕР:
|
Ос δ, адрес 09 Величина на рефр.= + 84˝ 1 бит съотв. на 1.296˝ 84˝ съотв. 65 бит програма: + 000065 09 |
Ос α, адрес 07 Величина рефр. = -84˝ 1 бит съотв. на 1.296˝ = 0.0864 сек 84˝ = 5.6 сек. съотв. 65 бит програма -000065 07 |